西门子厂120控制器模块6厂尝3040-0狈础00-0础础0 西门子厂120控制器模块6厂尝3040-0狈础00-0础础0 
国产鲁鲁视频草莓 上海诗慕自动化设备有限公司
本公司销售西门子自动化产物,*,质量保证,价格优势
西门子笔尝颁,西门子触摸屏,西门子数控系统,西门子软启动,西门子以太网
西门子电机,西门子变频器,西门子直流调速器,西门子电线电缆
我公司大量现货供应,价格优势,*,德国* 6SL3040-0NA00-0AA0***备件*** 基于 SIMOTION Drive 的 控制器扩展模块 CX32; 整流器控制单元 用于比例缩放 驱动轴 SIMOTION D4x 5; 接口:4 DI,4 DI/DO 4 个 Drive-CLiQ 一、概述
S120 有两种形式:
用于多轴系统的 DC/AC 装置
用于单轴系统的 AC/AC 装置 这两种形式的 Firmware V2.4 及以上版本都已具备基本定位功能。当前V2.4 版本的 S120具有如下定位功能:
? 点动 (Jog): 用于手动方式移动轴,通过按钮使轴运行至目标点
? 回零 (Homing/Reference):用于定义轴的参考点或运行中回零
? 限位 (Limits):用于限制轴的速度、位置。包括软限位、硬限位
? 程序步 (Traversing Blocks): 共64个程序步,可自动连续执行一个完整的程序也可单步执行
? 直接设定值输入/手动设定值输入 (Direct Setpoint Input / MDI):目标位置及运行速度可由上位机实时控制。 使用 S120 基本定位功能的前提条件:
调试软件:Starter V4.0 或更高版本 / SCOUT V4.0 或更高版本
硬件版本:SINAMICS FW: V2.4 HF2 或更高版本 注:
安装 SCOUT V4.0 需要STEP 7 版本至少为 V5.3.3.1 以上 二、激活基本定位功能
厂120的定位功能必须在变频器离线配置中激活,步骤如下: 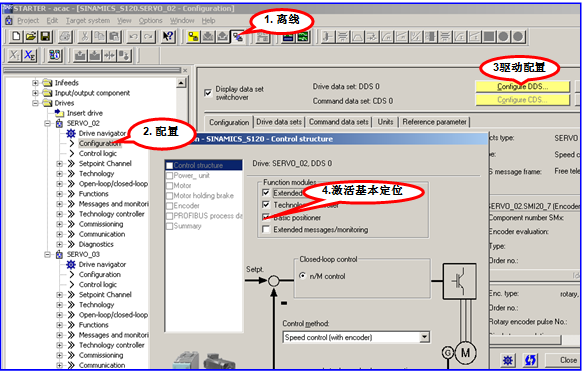
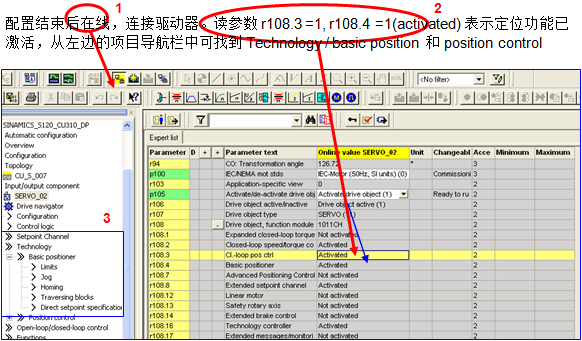
定位功能激活后可使用厂罢础搁罢贰搁中的控制面板或参数表进行设置 定位功能激活后可使用厂罢础搁罢贰搁中的控制面板或参数表进行设置 使用控制面板 使用参数表 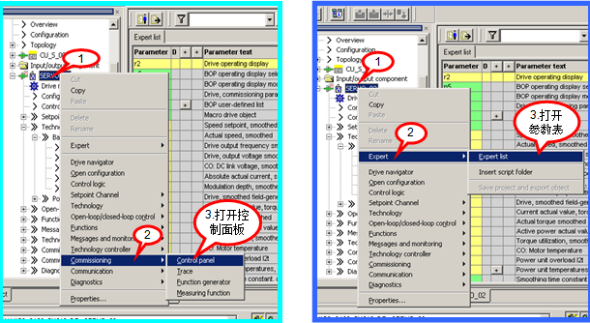
使用控制面板的操作步骤: 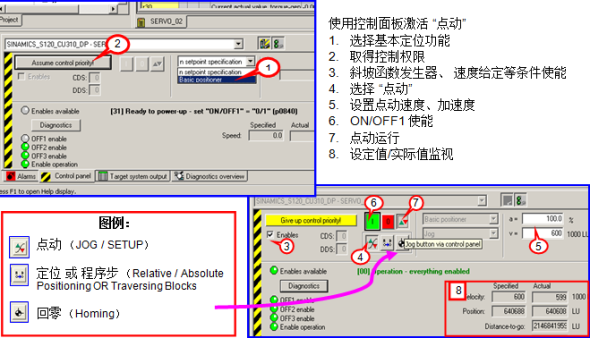
叁、基本定位冲点动(闯翱骋) S120 中基本定位功能的点动有两种方式:
? 速度方式( travel endless):点动按钮按下,轴以设定的速度运行直至按钮释放。
? 位置方式( travel incremental):点动按钮按下并保持,轴以设定的速度运行至目标位置后自动停止。 ? 使用控制面板的点动功能仅限于速度方式,位置方式需使用参数表设定。 ? 执行点动功能,应先使能变频器ON/OFF1(P0840) 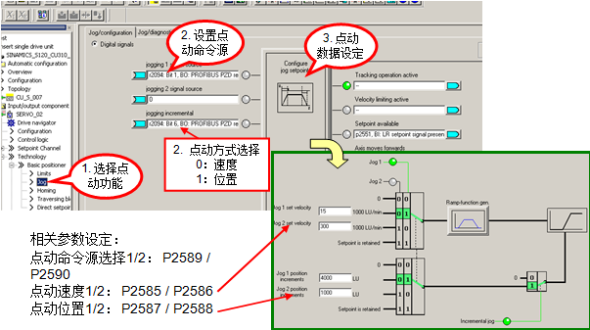
四、基本定位_回零(Homing / Reference)
回零/寻参(Homing / Reference)
回参考点模式(回零模式)只有使用增量编码器(旋转编码器 Reserver、正/余弦编码器Sin/Cos 或 脉冲编码器)时需要,因每次上电时增量编码器与轴的机械位置之间没有任何确定的关系。因此轴都必须被移至预先定义好的零点位置。即执行 Homing 功能。
当使用编码器 ( Absolute ) 时每次上电不需重新回零。
S120 中回零有三种方式:
? 直接设定参考点 (Reference): 对任意编码器均可
? 主动回零 (Reference point approach): 主要指增量编码器
? 动态回零 (Flying Reference):对任意编码器均可 4.1设置参考点 (Set_Reference)
通过用户程序可设置任意位置为坐标原点。通常情况下只有当系统即无接近开关又无编码器的零脉冲时,或者当需要轴被设置为一个不同的位置时才使用该方式 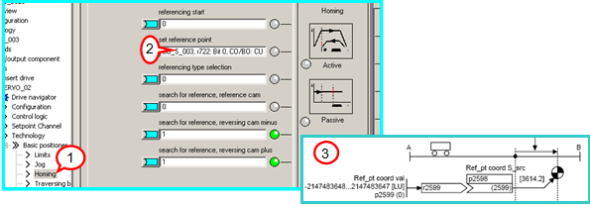
操作步骤(已设定开关量输入点 DI2 为ON/OFF1命令源 P840)
1. 进入“Homing”
2. 连接一数字量输入点 ( DI 1 )至参数 P2596作为设置参考点信号位,该位上升沿有效
3. 设定参考点位置坐标值 P2599(如 0)
4. 闭合DI 2运行使能
5. 闭合DI 1 激活“设置参考点”命令,于是该轴当前位置 r 2521 立即被置为P2599 中设定的值。如 r2521=0 4.2主动回零(Active Homing)
主动回零方式只适用于增量编码器,编码器只需在初始化阶段进行编码器校准,以后不必做回零 主动回零有叁种方式:
仅用编码器零标志位( Encoder Zero Mark ) 回零
仅用外部零标志( External Zero Mark ) 回零
使用接近开关 + 编码器零标志位( Homing output cam + Zero Mark ) 回零 4.2.1编码器的主动回零
如果我们使用编码器并且作主动回零时会看到如下页面: 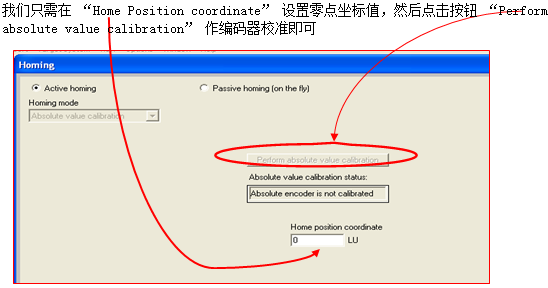
| 